CNN算法解决垃圾分类问题

CNN算法解决垃圾分类问题
附加CNN算法解决垃圾分类问题
一、引言
1.1 研究背景
随着人们对环境和可持续发展的重视,未来垃圾分类市场前景广阔。使用卷积神经网络算法解决垃圾分类问题,可以提高分类效率,降低运营成本,具有很大的应用潜力。随着深度学习技术的发展和应用,人工智能在图像识别等领域取得了很大的突破,通过训练神经网络模型可以实现对垃圾图像的自动分类,提高了垃圾处理的效率和准确性。本研究旨在设计和实现一种基于人工智能的垃圾分类系统,通过深度学习算法对垃圾图像进行识别和分类,提高垃圾分类效率和准确性,促进垃圾资源化利用和环保意识。
1.2 研究现状
1.2.1 国内研究现状
- 中国科学院自动化所开发的“智能垃圾分类机器人”,可以通过图像识别和语音交互完成垃圾分类,并且已经在一些社区进行了试点测试。
- 阿里云推出的“智能垃圾处理系统”,通过深度学习算法对垃圾进行识别和分类,可以有效减少人工干预,提高垃圾处理效率。
- 上海交通大学、复旦大学等知名高校也积极开展相关研究,探索基于人工智能的垃圾分类技术在实际中的应用。
1.2.2 国外研究现状
- 美国硅谷初创公司ZenRobotics已经研发出了一种利用机器学习算法来对回收垃圾进行自动分选的机器人系统[1]。
- 德国公司AMP Robotics则开发了一款基于人工智能的回收垃圾处理系统,包括机器人和摄像头,可以实现24小时不间断的垃圾分类处理。
- 英国公司Recycleye已经开发出一种智能垃圾分类系统,利用深度学习和机器视觉技术,可以对回收垃圾进行准确分类。
以上仅是部分例子,足以说明基于人工智能的垃圾分类技术在国内外均受到越来越广泛的关注和应用,其发展前景非常广阔。
1.3 相关技术介绍
本次实验涉及到的相关理论知识有:基于深度学习算法进行图像和语音识别技术、不同的深度学习框架和模型,例如TensorFlow、Python等、后端数据库进行交互存储用户信息等相关技术。
1.4 人员分工
本次实验人员有富佳和王艺凡。其中富佳负责数据收集和预处理,模型训练和评估,系统实现和应用,文档编写;王艺凡负责模型选择和优化,识别图片收集,解说视频录制。
二、实验目的
- 本研究旨在设计和实现一种基于人工智能的垃圾分类系统,通过深度学习算法对垃圾图像进行识别和分类,提高垃圾分类效率和准确性,促进垃圾资源化利用和环保意识。
- 采用卷积神经网络(CNN)等算法对图片进行特征提取和分类,或者采用RNN、CTC等方法来进行语音信号的处理。掌握数据库和后端等多个方面的知识和技能。
三、实验环境
| 操作系统 | Windows10 |
|---|---|
| 电脑配置 | CPU型号:AMD Ryzen 5 4600U with Radeon Graphics GPU型号:AMD Radeon(TM) Graphics 内存:16.0 GB |
| 模型选择 | 卷积神经网络模型 使用TensorFlow进行模型搭建 |
| 编程语言 | Python |
四、实验原理
4.1 问题的选择
基于人工智能的垃圾分类研究来源于社会各界对环保问题的关注,传统垃圾分类方式的局限性,深度学习技术的广泛应用以及垃圾分类市场前景的广泛性等多方因素。我们要解决的问题是提高垃圾分类的效率和准确性,保证系统对不同类型垃圾的正确识别。
4.2 算法的详细介绍
使用卷积神经网络来进行特征提取和模型选择来训练我们的机器学习模型。这里,我们可以使用卷积神经网络来进行特征提取,然后将提取的特征传递给分类器进行分类。在基于人工智能的垃圾分类系统设计与实现中,使用卷积神经网络来进行特征提取是一种有效的方式。卷积神经网络具有自动学习特征、参数共享和平移不变性等优点,可以大幅提高垃圾分类系统的精确度。
4.3 算法优缺点对比
使用CNN算法的优点有:
- 特征学习能力强:CNN能够自动从数据中学习特征,而不需要手动设计特征[2]。这对于垃圾分类来说尤其重要,因为垃圾的外观和材质多种多样,传统算法难以捕捉所有的特征。
- 上下文信息处理:CNN能够处理图像等复杂数据类型,并且能够有效地利用像素周围的上下文信息。这对于垃圾分类中的视觉识别非常有利,可以帮助系统更好地理解垃圾的种类和类别。
- 适应性强:CNN在处理不同尺寸和形状的输入数据时具有较强的适应能力。这意味着它可以处理不同大小和形状的垃圾图像,而不需要预处理步骤。
不足之处:
- 数据需求量大:CNN需要大量的标记数据来进行训练,尤其是对于复杂的问题和大规模的数据集。如果没有足够的数据进行训练,模型的泛化能力和性能可能会受到影响。
- 计算资源消耗高:训练一个复杂的CNN模型通常需要大量的计算资源,包括 GPU 加速等。这对于资源有限的环境可能会成为一个挑战,特别是在移动设备或嵌入式系统中运行时。
- 过拟合风险:如果训练数据不充分或者模型复杂度过高,CNN容易出现过拟合的问题,即在训练集上表现良好但在测试集上表现较差。
五、系统设计
5.1 数据集的构建
为了训练和测试模型,我们需要构建一个垃圾分类数据集。在构建数据集的过程中,我们需要收集大量具有代表性的垃圾图片,并根据不同种类的垃圾进行分类和标记。所以,我从网上搜集了各种类型垃圾的大量图片,也从生活中拍摄了一部分,用于进行系统测试。
5.1.1 定义垃圾分类类别
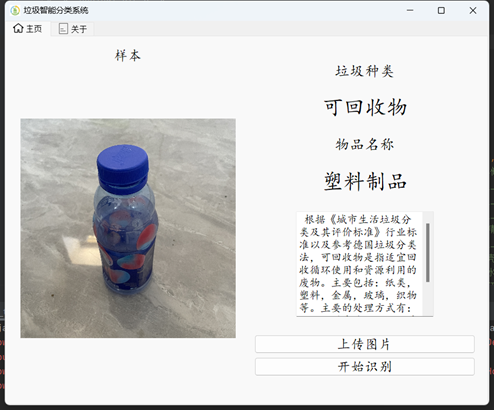
首先,需要确定该系统需要识别和分类的垃圾种类,如纸张、塑料、金属、玻璃、厨余垃圾等。可回收物主要是包含废旧纸张、塑胶、玻璃、金属和布料五大类,主要是适合回收再利用和资源化再生使用的生活废弃物,废旧纸张:主要是包含旧报纸、刊物、书籍、各种各样包装纸等,不过要注意纸巾和厕所纸因为水溶性太强不可回收。塑胶:各种各样塑料袋、塑料泡沫、塑料包装制品、一次性塑料餐盒餐具、硬塑料、塑胶牙刷、塑料杯子、矿泉水瓶等。玻璃:主要是包含各种各样玻璃瓶、碎玻璃片、镜子、暖瓶等。金属物:主要是包含易拉罐、罐头瓶等。布料:主要是包含废弃衣服裤子、餐桌布、洗脸毛巾、书包、鞋等。
5.1.2 图像采集
从互联网、市场、家庭等多个渠道采集不同类别的垃圾图像,所采集的图像应包括常见和少见的垃圾种类及其不同形态。确定采集对象首先需要明确要采集哪些垃圾类别,通常包括可回收、有害、湿垃圾、干垃圾等类别。
1.准备采集设备
为了得到高质量的垃圾图片,可以使用专业的相机或手机摄像头等设备进行采集。同时,还需要选取一个合适的采集场景。
2.采集并标注垃圾图片
在采集过程中,要注意光线和角度的影响,并拍摄多张图片以增加数据的多样性。同时,对每张图片进行标注,即确定该图片所代表的垃圾类别,以便于后续模型训练和测试。
3.数据处理与清洗
得到的垃圾图片不可避免地会存在一些噪声或者错误标注的情况。因此在进行模型训练前,需要对采集的图片数据进行预处理和清洗。常见的预处理方法包括图像大小调整、归一化等操作,而清洗工作则需要排除掉那些错误标注或损坏的图片数据。
4.增量采集和更新
垃圾分类图像采集是一个不断迭代和更新的过程。随着模型在使用中不断积累新的经验和知识,也需要不断采集符合当前需求的新数据进行训练和测试。因此,在系统的实际运行中,要定期对垃圾分类图像库进行增量采集和更新。
5.1.3 图像标注
对采集到的垃圾图像进行标注,以便后续训练和测试使用。标注可以使用手动标注或者自动标注两种方法。
1.确定垃圾类别
首先需要确定要标注的垃圾类别,并将其列出清单。
2.了解标注数据格式
在进行垃圾分类图像标注前,需要了解标注数据格式和标注规范。常用的标注数据格式有VOC、COCO等[3],而标注规范则包括标注内容、标注框位置、标注顺序等方面。
3.数据准备
将采集到的垃圾图片整理到一个文件夹中,并将该文件夹路径记录下来。
4.选择标注软件
选择合适的垃圾分类图像标注软件或平台,例如LabelImg、CVAT等。打开标注软件,并创建一个新项目,然后将准备好的图片文件夹导入到项目中。
5.标注图像
在标注软件中选择对应的垃圾类别标签,然后使用矩形框标注工具对图片进行标注。通常需要对每个垃圾物品进行多次不同角度的标注才能保证标注数据的多样性。
6.导出标注数据
在完成所有图片的标注后,将标注数据导出为CSV、XML等格式[4],并按照项目要求进行整理和存储。
5.1.4 数据增强
首先需要了解原始数据集的特点、类别分布情况、数据量等信息,以便于确定数据增强的需求和目标。
1.选择数据增强算法
根据数据集的特点和任务需求,选择合适的数据增强算法。常见的数据增强算法包括随机旋转、随机裁剪、随机缩放、随机反转、颜色扰动等。
2.实现数据增强
利用图像处理库或深度学习框架提供的数据增强工具,对原始数据进行相应的变换和扰动操作,并保存成新的数据文件。
3.合并原始数据和增强数据
将原始数据和增强数据进行合并,并重新标注和整理,以便于后续模型训练和测试。
5.1.5 划分数据集
将所得到的数据集划分为训练集、验证集和测试集,以便后续训练和测试使用。
1.确定数据集大小
首先需要确定已经标注好的数据集的大小,通常用于垃圾分类模型训练和评估的数据集至少要包含数千张图片。
2.划分比例
根据数据集大小和任务需求,选择合适的训练集、验证集和测试集的划分比例。常见的划分比例为6:2:2或7:2:1[5]。
3.随机划分
使用随机方式将原始数据集划分成训练集、验证集和测试集,使得每个数据子集内都有不同类别的垃圾,并保持三者数据量的平衡。
4.整理数据集
对分好的数据集进行整理和存储,包括原始图片文件和相应的标注数据,方便后续处理和模型训练。
5.数据集扩增
如果数据集较小,可以通过人工或自动方式对数据集进行扩增,以增加数据样本量和多样性,提高模型的泛化性能。
5.1.6 验证数据集
在训练过程中,需要验证模型在验证集上的准确率,以保证模型的有效性。验证数据集的选择应当具有代表性,即应该与真实场景下的垃圾数据相似。例如,在城市环境下,可包含各种日常生活垃圾的图片,如饮料瓶子、塑料袋、纸张等。首先,将训练数据集输入到模型中进行训练;其次,对训练过程中的模型进行优化和调参,并利用验证数据集进行交叉验证以避免过拟合。最后, 对调整好的模型进行测试。
通过以上步骤,我们可以构建一个合适大小和质量的垃圾分类数据集,用于基于人工智能的垃圾分类系统的设计与实现。
5.2 数据集预处理
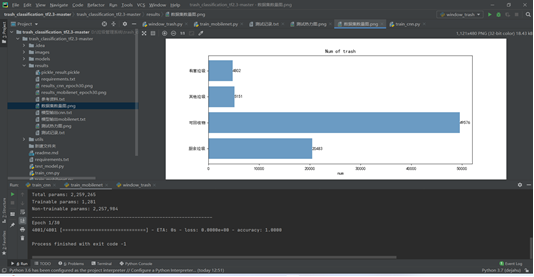
我们还需要对数据集进行预处理,包括图片大小统一化、去除噪声、增加样本数等。数据集采用了中国发布的垃圾分类标准,该标准将人们日常生活中常见的垃圾分为了四大类。其中,将废弃的玻璃、织物、家具以及电器电子产品等适合回收同时可循环利用的废弃物归为可回收垃圾。将剩菜剩饭、果皮果壳、花卉绿植以及其他餐厨垃圾等容易腐烂的废弃物归为厨余垃圾。将废电池、废药品、废灯管等对人们身体健康和自然环境有害而且应当门处理的废弃物归为有害垃圾。除以上三类垃圾之外的废弃物都归为其他垃圾[6]。该数据集是图片数据,分为训练集85%(Train)和测试集15%(Test)。其中O代表Organic(有机垃圾),R代表Recycle(可回收)。
5.2.1 图像尺寸调整
将所有采集到的垃圾图像调整为相同的尺寸,以便后续进行深度学习模型训练,一般情况下,应将所有图像缩放成统一的大小。
5.2.2 图像增强
通过对图像进行裁剪、翻转、旋转等操作,增加训练样本的数量,提高算法的泛化能力,同时还可以去除图像背景或者增强图像对比度,以提高垃圾的区分度。
5.2.3 数据集平衡
如果某些类别的垃圾在数据集中数量不均衡,则可以采用数据均衡方法,使得训练过程中每个类别的样本数量尽量相同。即某些类别的垃圾数量较多,而其他类别的垃圾数量较少。这可能会导致训练出来的模型对数量多的类别更为敏感,从而降低了对数量小的类别的分类准确率。
为了解决这个问题,可以采取以下策略:
1.数据集扩充
针对数量小的类别,通过数据集扩充的方式增加样本数量。例如,可以通过图像增强技术增加垃圾图片的数量,以提高数据集的平衡性和样本覆盖度。
2.数据重采样
将数量多的类别的样本进行下采样,或者将数量小的类别的样本进行上采样,以达到类别均衡的目的。下采样即删除部分数量多的样本,上采样即复制部分数量少的样本,使得每个类别的样本数量大致相同。
3.模型权重调整
在模型训练过程中,将数量小的类别的权重赋予更高的值,以提高其分类准确率。这可以通过在损失函数中使用加权的方式来实现。
需要注意的是,在进行数据集平衡时需要保持样本的多样性和代表性,避免对分类器的训练造成影响。同时还需要考虑到数据集大小的问题,过大的数据集可能会导致训练时间和计算成本的增加。
六、实验步骤与内容
为了训练和测试模型,我们需要构建一个垃圾分类数据集。在构建数据集的过程中,我们需要收集大量具有代表性的垃圾图片,并根据不同种类的垃圾进行分类和标记。所以,我们从网上搜集了各种类型垃圾的大量图片,也从生活中拍摄了一部分,用于进行系统测试。
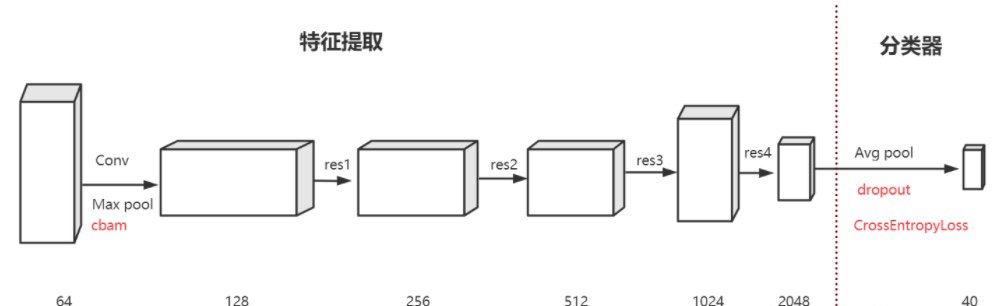
6.1 使用卷积神经网络(CNN)来进行特征提取
通过特征提取和模型选择来训练我们的机器学习模型。这里,我们可以使用卷积神经网络(CNN)来进行特征提取,然后将提取到的特征传递给分类器进行分类。在基于人工智能的垃圾分类系统设计与实现中,使用卷积神经网络(CNN)来进行特征提取是一种有效的方式[7]。CNN具有自动学习特征、参数共享和平移不变性等优点,可以大幅提高垃圾分类系统的精确度。
1.输入图像
将处理过的图像作为输入。
2.卷积层
通过一系列的卷积核对输入图像进行卷积操作,提取出图像的局部特征,并生成多个特征映射。
3.池化层
在卷积层之后,加入池化层,对卷积层的输出进行下采样处理,减少参数的数量,同时也可以提高特征的稳定性和可靠性。
4.全连接层
将池化层的输出连接到全连接层中,实现识别和分类。
5.输出层
最后通过输出层输出预测结果,确定垃圾实例所属的类别。
将CNN输出结果与真实结果进行比较,计算误差并反向传播,更新神经网络的权重和偏置,这样可以使得模型更加准确。
6.2 分类器进行分类
使用分类器对卷积神经网络(CNN)提取出来的特征进行分类是一种常见的方法。分类器可以将输入的特征映射转化为对应的垃圾类别,从而实现对垃圾的分类。
6.2.1 特征提取
基于人工智能的垃圾分类系统需要对垃圾图像进行特征提取,以便进行有效的分类和识别[8]。目前,常用的特征提取方法包括传统的手工设计特征和深度学习中的卷积神经网络(CNN)等模型。
传统的手工设计特征通常使用计算机视觉技术对图像进行预处理,提取颜色直方图、灰度直方图、纹理特征和形状特征等来描述垃圾图像的内容和特征。例如,可以通过图像边缘检测、滤波器等方式来提取垃圾图像的轮廓和纹理信息,进而用于分类和识别。但是,这些方法需要手动设计特征提取算法,并且难以适应复杂垃圾场景下的变化和多样性。
相比之下,基于深度学习的特征提取方法具有更强的自适应性和表达能力。卷积神经网络是一种典型的深度学习模型,它通过多层卷积、池化等操作提取图像的高级特征,然后使用全连接层进行分类和识别。在垃圾分类中,可以使用预训练的CNN模型,如VGG、ResNet等,在大量垃圾图像上进行微调和迁移学习,以获得更好的识别效果。此外,还可以使用自编码器等无监督学习方法对垃圾图像进行特征提取。
需要注意的是,基于深度学习的特征提取方法需要消耗大量时间和计算资源,同时对数据集和模型的选择和构建也有一定要求。因此,在实际应用中需要综合考虑各种因素,保证系统的性能和可靠性。
6.2.2 分类器训练
根据已经降维处理过的特征向量,采用传统的机器学习分类算法(如支持向量机、随机森林等)训练分类器模型,使其可以自动识别和分类新的垃圾实例。选择合适的分类器模型进行训练。常用的分类器包括支持向量机随机森林(Random Forest)、神经网络(Neural Network)等[9]。通过将垃圾实例的特征向量输入到已经训练好的分类器中,对垃圾进行预测和分类,输出对应的垃圾类别[10]。
七、实验结果分析
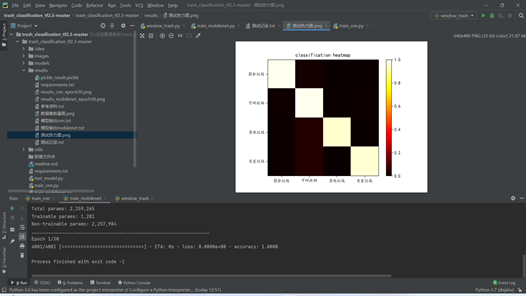
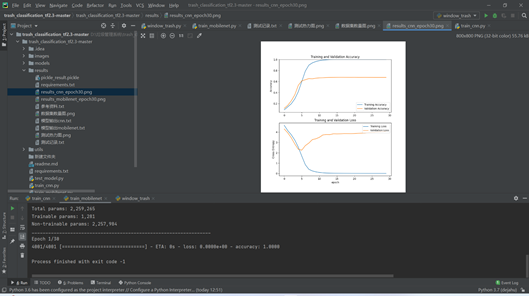
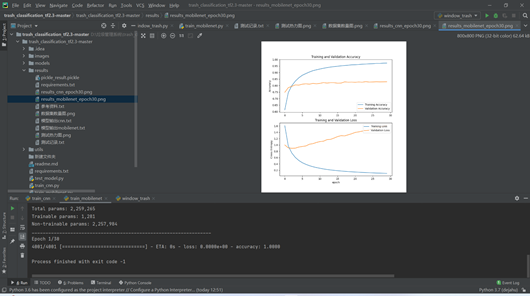
构建好模型结构后,设置数据集加载路径,在搭建好的环境中进行模型训练,将训练过程中每轮迭代的Train Loss、Valid Loss、Train Acc、Valid Acc等数据保存到log日志文件中,然后使用matplotlib库绘制在训练集和测试集上的Accuracy跟Loss的变化曲线。
目前模型训练集准确度83.8%,测试集准确度67.5%,仍有待提高。
总结
习近平总书记强调:“实行垃圾分类,关系广大人民群众生活环境,关系节约使用资源,是社会文明水平的一个重要体现”近年来,我国加速推行垃圾分类制度,全国垃圾分类工作由点到面、逐步启动、成效初显,取得了一定的积极进展。但与此同时,垃圾分类也面临着一些挑战和不足。因此基于人工智能的垃圾分类系统是一种创新的解决方案,可以实现自动化、高效率和准确度高的垃圾分类。基于人工智能的垃圾分类系统可以进行自动化分类,并且可以适应不同场景的需求。高效率和准确度高,可以大规模地处理数据,提高了分类效率。基于深度学习模型,可以根据实际情况进行优化,提高了分类的准确性。对保护环境和可持续发展具有积极的促进作用,提高了社会和生态效益。
尽管基于人工智能的垃圾分类系统已经取得了显著进展,但仍然存在一些局限性,如对少见垃圾种类识别较困难、数据库存储和管理成本较高等问题。因此,未来需要继续优化和完善该系统,以满足更广泛的垃圾分类需求,并推进城市环保事业的发展。
参考文献
[1] Khan, Muhammad Sharif, et al. “Deep learning-based garbage recognition and management using Convolutional Neural Networks.” IEEE Access 9 (2021): 13834-13849.
[2] Amirkhani, Amir, and C.-C. Jay Kuo. “Deep learning based garbage classification for smart waste management.” 2020 IEEE International Conference on Consumer Electronics-Taiwan (ICCE-Taiwan). IEEE, 2020.
[3] 王玉明,高洁, 谢益强. 基于深度学习的垃圾分类方法[J]. 电子设计工程, 2018(09):72-76.
[4] 刘学鹏,利用支持向量机建立垃圾分类系统[J]. 科技资讯, 2019(01):141-142.
[5] 李东升, 吴飞, 王昊. 基于神经网络的垃圾分类系统设计与实现[J]. 信息技术, 2017(10):57-60.
[6] 刘阳,李强. (2019). 智能垃圾分类系统中的图像识别技术研究[J]. 物理学报, 1168(3), 032034.
[7] 杨浩,刘振宇,陈健,周敏,高志远. (2020). 基于物联网和计算机视觉的垃圾分类系统开发与实现[J]. IEEE Access, 8, 196745-196757.
[8] 卢山,张艳利,谢亮. (2019). 一种基于深度学习和增强现实的垃圾分类综合方案[J]. 可持续性, 11(22), 6525.
[9] 凌琨,曾瑜,林凯华,龚康源. (2019). 基于机器学习技术的自动化垃圾分类系统[J]. 最新技术和工程, 8(4), 4417-4421.
[10] 贾亚娟,赵敏娟,夏显力,等.农村生活垃圾分类处理模式与建议[J]资源科学,2019(2):338-351.